Modern Pump Selection Part 2: Theory Vs. Real World Operation of Variable Flow Pumping
/By Chad Edmondson
In variable speed pumping systems, does zero load ever result zero pump speed?
Practically speaking, the answer is no. In closed hydronic systems with 2-way valves there is almost always some amount of differential pressure created by continuous impeller rotation – even when variable speed drives are employed.
That’s not to say variable speed pump drives don’t save a lot of money over their operating life. They DO! But what variable speed can do in theory may lead to inflated expectations of what variable speed can do in a real life hydronic system.
Theoretical Reduction in Brake Horsepower
The efficiency projections of variable speed pump operation are based on the pump affinity laws. These laws state that:
1. Pump GPM capacity varies DIRECTLY as the speed (RPM) or impeller diameter ratio change.
2. Total pump head varies directly as the SQUARE of the speed (RPM) or impeller ratio change.
3. BHP varies directly as the CUBE of the speed (RPM) or impeller diameter ratio change.
Plot these mathematical facts on a graph a graph that relates directly to pump flow as we have in Figure 1and the numbers are pretty compelling.

Figure 1: Curve is a visual representation of the Pump Affinity Laws.
The pump curves at various speeds are shown in black. The green line represents the system head curve and the purple line represents the brake horsepower as it corresponds to the various speeds. As you can see, 50% reduction in speed results in a head loss from 100% to 25%. Brake horsepower drops to 12.5%. In other words, per the Affinity Laws, if we cut the speed of the pump in half, the head drops by the square to 25% and the brake horsepower drops by the cube (100 x 0.125 = 12.5% BHP).
Real World Limitations
The numbers don’t lie, so why is it that we never actually see such reductions in real world applications of variable speed pumps?
It is because the theory assumes 100% variable flow, which simply does not occur in typical closed HVAC systems where there is always some amount of constant fixed head loss.
When designers perform system head loss calculations as prescribed by ASHRAE 90.1, they must keep in mind that only a portion of this head will vary with load. This is because in closed systems with 2-way valves at each circuit, a constant fixed pressure must always be maintained at the coil – even at zero flow. This means that the pump impeller must always be spinning enough to generate a certain amount of minimum head. Otherwise, if there is a sudden requirement for 100% flow, causing the 2-way valve to open, there would not be enough differential pressure at the coil to establish full flow through the heat exchanger.

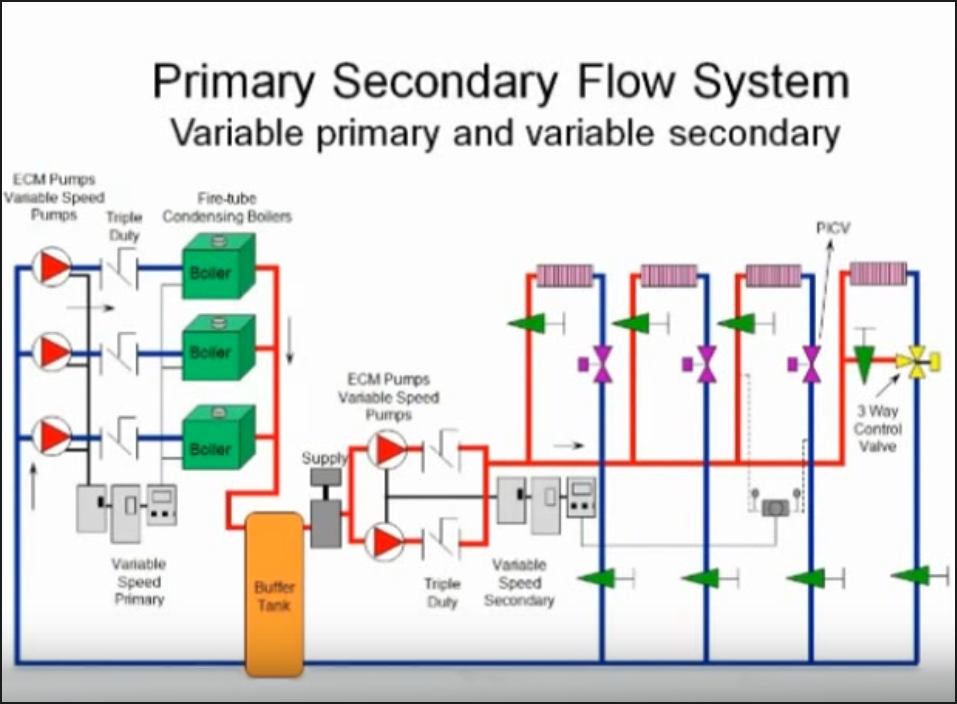
Figure 2: constant primary/variable secondary chilled water system with constant and variable head piping shown.
Figure 2 shows the piping of a constant primary/variable secondary chilled water system. The variable head is shown in red and the constant fixed head is shown in green. In this particular system, the pump has a variable head of 52 feet. This value defines the range to which the pump speed can be varied. The potential for variable speed bottoms out precisely at the minimum head required at the coil.
Relating this example to the system curve, we would still have a minimum requirement for 28 ft. of head at zero flow. The system (control) curve doesn’t begin at 0 GPM and 0 head. It begins at 28 feet and 0 flow and might look something like the control curve shown in orange in Figure 3.

Figure 3: Control curve reflects the actual variable head.
This is the reality of hydronic system design. The payback of variable speed systems will always be limited somewhat by the coil piping, control devices, and the coil itself. That said, as we get deeper into this series, we will demonstrate control measures that allow us to expand the potential for variable speed savings.